
Faster R-CNN:物体検出の進化

AIを知りたい
先生、「Faster R-CNN」って、速くなったっていうのはわかるんですけど、具体的に何がどう速くなったんですか?

AIエンジニア
良い質問だね。Faster R-CNN以前のモデルでは、画像の中から物体のありそうな場所を見つけるのに「Selective Search」という方法を使っていたんだ。これは、色んな大きさの四角い枠をたくさん作って、その中にあるものが物体かどうかを一つ一つ調べていく方法で、とても時間がかかっていたんだよ。
AIを知りたい
なるほど、それで時間がかかっていたんですね。Faster R-CNNではどうなったんですか?
AIエンジニア
Faster R-CNNでは「領域提案ネットワーク」といって、物体の場所を提案する部分を画像認識と同じ仕組み(CNN)で行うように変更したんだ。これによって、物体の場所を探す処理が速くなり、全体的な処理時間も短縮されたんだよ。しかも、精度も向上したんだ。
Faster R-CNNとは。
人工知能で使われる言葉「ファスター アールシーエヌエヌ」について説明します。ファスター アールシーエヌエヌは、ファスト アールシーエヌエヌというものをさらに良くしたものです。もとになったアールシーエヌエヌやファスト アールシーエヌエヌでは、ものの場所を見つけるためにセレクティブサーチという方法を使っていましたが、ファスター アールシーエヌエヌではこれをリージョン プロポーザル ネットワークというしくみに変えました。リージョン プロポーザル ネットワークも一種の人工知能で、これを使うことで処理が速くなりました。さらに、速くなっただけでなく、ものの場所を見つける精度も上がっています。
高速な物体検出技術

近年の計算機視覚の進歩において、物体の位置や種類を特定する物体検出技術は欠かせないものとなっています。自動運転技術では、周囲の車や歩行者、信号などを瞬時に見つける必要がありますし、監視システムでは不審な人物や物を素早く検知することが求められます。また、画像検索では、入力された画像の中に写っている物体を正確に認識することで、より的確な検索結果を表示することができます。
このような物体検出技術の中でも、「より速く」「より正確に」物体を検出する方法が常に求められており、その要求に応える技術の一つとしてFaster R-CNNが登場しました。従来の物体検出技術は、処理に時間がかかることが大きな課題でした。例えば、一枚の画像から物体を検出するのに数秒かかることも珍しくなく、リアルタイムでの処理は困難でした。これは、動画のように連続した画像から物体を検出する必要がある用途では、大きな制約となっていました。
Faster R-CNNは、この処理速度の問題を大幅に改善し、ほぼ即座に物体を検出することを可能にしました。この技術革新の鍵は、二つの段階に分かれていた物体検出手順を一つのネットワークに統合した点にあります。従来の手法では、まず画像の中から物体がありそうな場所を大まかに特定し、次にその場所の詳細な分析を行い、物体の種類を判別していました。Faster R-CNNでは、これらの処理を一つのネットワークで同時に行うことで、処理速度を飛躍的に向上させました。
Faster R-CNNの登場により、リアルタイムに近い速度での物体検出が可能になったことで、物体検出技術の応用範囲は大きく広がりました。例えば、自動運転技術においては、周囲の状況を瞬時に把握し、より安全な運転を実現するために欠かせない技術となっています。また、製造現場では、製品の欠陥を自動的に検出するなど、様々な分野で活用が進んでいます。今後も、更なる高速化・高精度化が期待される物体検出技術は、私たちの生活をより便利で安全なものにするための重要な役割を担っていくことでしょう。
| 項目 | 内容 |
|---|---|
| 物体検出技術の応用 | 自動運転、監視システム、画像検索など |
| 課題 | 処理速度の遅さ |
| Faster R-CNNの登場 | 処理速度の大幅な改善 |
| Faster R-CNNの特徴 | 二段階の処理を一つのネットワークに統合 |
| Faster R-CNNの利点 | リアルタイムに近い速度での物体検出 |
| Faster R-CNNの応用 | 自動運転、製造現場など |
| 将来展望 | 更なる高速化・高精度化 |
領域提案ネットワークの導入

これまで、画像の中から物体が存在するかもしれない場所を見つけるには、選択的探索と呼ばれる手法がよく使われていました。この手法は、画像の色の変化や模様の違いなどに注目して、滑らかな領域をグループ化し、物体があると考えられる部分を四角形で囲んでいきます。しかし、この方法は処理に時間がかかるという欠点がありました。
そこで登場したのが「領域提案網(RPN)」です。領域提案網は、高速畳み込みニューラル網(CNN)を利用して、画像全体から物体がありそうな場所を素早く提案する仕組みです。これまでの手法のように、別々に領域を探してから物体を認識するのではなく、領域の提案と物体の認識を同時に行います。
具体的には、まずCNNを使って画像の特徴を捉えます。次に、その特徴マップ上に小さな窓を滑らせて、それぞれの窓について「物体が含まれているかどうか」と「物体の周りの四角形の大きさや位置」を予測します。この窓を「アンカー」と呼びます。アンカーは様々な大きさや縦横比を持つように設定されているため、様々な大きさや形状の物体を検出できます。
領域提案網はCNNと一体化しているため、処理全体を高速化できます。また、領域提案の精度も高く、より正確に物体の位置を特定できるようになりました。これにより、高速物体検出手法である「高速領域畳み込みニューラル網(Faster R-CNN)」の実現に大きく貢献しました。
| 手法 | 概要 | 利点 | 欠点 |
|---|---|---|---|
| 選択的探索 | 画像の色の変化や模様の違いに注目し、滑らかな領域をグループ化して物体があると考えられる部分を四角形で囲む | – | 処理に時間がかかる |
| 領域提案網 (RPN) | 高速畳み込みニューラル網(CNN)を利用し、画像全体から物体がありそうな場所を素早く提案する。領域の提案と物体の認識を同時に行う。アンカーと呼ばれる様々な大きさや縦横比を持つ窓を用いて、物体の有無、大きさ、位置を予測する。 | 処理が高速、領域提案の精度が高い | – |
Fast R-CNNとの比較
物体検出の分野において、処理速度と精度の両立は重要な課題です。高速な物体検出を実現する手法として、Fast R-CNNが知られていましたが、Faster R-CNNはそれをさらに進化させたモデルです。両者の大きな違いは、画像の中から物体がありそうな領域を提案する部分にあります。Fast R-CNNではSelective Searchと呼ばれる手法を用いていましたが、この処理には比較的時間がかかっていました。Faster R-CNNでは、この領域提案の段階にRegion Proposal Network(RPN)と呼ばれる新しい仕組みを導入しました。
RPNは、画像全体を一度に解析して物体がありそうな領域を高速に提案することができます。Selective Searchのように、一つずつ領域を調べていく方法と比べて、大幅な時間短縮を実現しました。これにより、物体検出全体の処理速度が向上し、よりリアルタイムに近い処理が可能になりました。具体的には、領域提案にかかる時間が数秒から数十ミリ秒へと大きく短縮されました。これは、動画解析のようなリアルタイム性が求められる応用において大きな利点となります。
さらに、Faster R-CNNは処理速度の向上だけでなく、検出精度もFast R-CNNと同等以上を達成しています。つまり、速度と精度の両面でFast R-CNNを上回る性能を持つ、より優れた物体検出モデルと言えるでしょう。高速な処理と高い精度を両立したFaster R-CNNは、自動運転や監視カメラなど、様々な分野での応用が期待されています。これにより、より安全で便利な社会の実現に貢献することが期待されます。
| 項目 | Fast R-CNN | Faster R-CNN |
|---|---|---|
| 領域提案 | Selective Search (遅い) | Region Proposal Network (RPN) (速い) |
| 処理速度 | 遅い (領域提案に数秒) | 速い (領域提案に数十ミリ秒) |
| 検出精度 | 高い | Fast R-CNNと同等以上 |
| 応用分野 | – | 自動運転、監視カメラなど |
処理の効率化

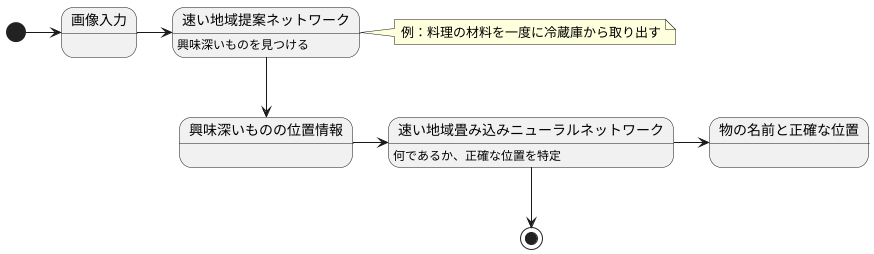
処理の速さを高め、無駄を省くために、二つの仕組みを一つにまとめたものがあります。それは、速い地域提案ネットワークと速い地域畳み込みニューラルネットワークを組み合わせたものです。
速い地域提案ネットワークは、画像のどこに興味深いものがあるかを見つけ出す役割を担います。そして、その見つけた場所の情報は、そのまま速い地域畳み込みニューラルネットワークに渡されます。速い地域畳み込みニューラルネットワークは、渡された情報に基づいて、その場所にあるものが何であるかを判断し、さらにそのものの位置を正確に特定します。
このように二つの仕組みを一つにまとめることで、同じ計算を何度も繰り返す必要がなくなり、処理にかかる時間を大幅に短縮することができます。例えるなら、料理を作る際に、同じ材料を何度も冷蔵庫から取り出すのではなく、一度に取り出してまとめて使うようなものです。
また、二つの仕組みは、同じ土台となる情報を使います。これは、同じ地図を元に、一方は宝探し、もう一方は景色の名前調べをするようなものです。別々の地図を用意する必要がないため、情報の保管場所を節約することができます。
これらの工夫により、限られた機械の能力でも効率よく作業を進めることができます。小さな工場でも、作業手順を工夫し、道具をうまく使い回すことで、大きな工場に負けない生産性を実現できるようなものです。
このように、無駄をなくし、限られた資源を最大限に活用することで、処理の効率を大きく向上させることができます。これは、私たちの日常生活にも通じる重要な考え方と言えるでしょう。
高い汎用性

「速い領域畳み込みニューラルネットワーク」とは、画像や動画に映る様々なものを認識する技術です。まるで人間のように、写真に写る人、車、動物など、多種多様な対象を見分けることができます。この技術は、あらかじめ沢山の例を見せることで学習していきます。例えば、車の画像を大量に見せることで、車がどのような形や色をしているのかを覚え、新しい画像でも車を見つけられるようになります。
この技術のすごいところは、学習内容を変えることで、認識できる対象も自由自在に変えられる点です。例えば、工場で不良品を見つける学習をさせれば、製品検査の自動化に役立ちます。また、医療現場でレントゲン写真から病変を見つけ出す学習をさせれば、医師の診断を支援することも可能です。このように、様々な分野に応用できる柔軟性こそがこの技術の大きな特徴です。
さらに、この技術は静止画だけでなく、動画中の動いているものも認識できます。これは、あたかも人間の目が動画の動きを追うように、連続した画像の中で対象物を追跡できることを意味します。この機能は、自動運転技術で周囲の車や歩行者を認識する際に非常に重要です。刻々と変化する状況の中で、周りの状況を正確に把握し、安全な運転を支援します。また、防犯カメラの映像から不審な動きをする人物を特定するなど、安全を守る上でも役立ちます。
このように、「速い領域畳み込みニューラルネットワーク」は、私たちの生活をより便利で安全なものにするために、様々な場面で活躍が期待される技術です。
| 技術名 | 概要 | 学習方法 | 応用例 | 特徴 |
|---|---|---|---|---|
| 速い領域畳み込みニューラルネットワーク | 画像や動画に映る様々なものを認識する技術 | あらかじめ沢山の例を見せることで学習 (例: 車の画像を大量に見せることで、車がどのような形や色をしているのかを覚え、新しい画像でも車を見つけられるようになる) |
|
|
今後の発展

「もっと速く、もっと正確に、もっと軽く」これが、画像の中から目的の物を探し出す技術、物体検出技術の進化の方向です。既に大きな進歩を遂げた「高速領域畳み込みニューラルネットワーク(Faster R-CNN)」でも、更なる高みを目指した研究開発が盛んです。
まず、処理速度の向上は欠かせません。動画のように連続した画像から物を瞬時に見つけるには、より速い情報処理が求められます。また、精度の向上も重要な課題です。例えば、自動運転では、人や車、信号などを正確に認識することが安全性を左右します。僅かな見落としが大きな事故に繋がる可能性もあるため、誤認識を限りなくゼロに近づける必要があります。
さらに、少ない計算資源で動くことも重要です。大きな計算機を使わずに、スマートフォンや小型機器でも高度な物体検出を行えるようになれば、応用範囲は大きく広がります。例えば、工場の製造ラインで不良品を自動で見つけたり、家庭で見守りロボットが家族の異変を察知したりするなど、様々な場面で活躍が期待できます。
複雑な背景や照明条件でも正確に物を検出することも大きな課題です。例えば、暗い夜道や、物が重なり合っている状況でも、目的の物を確実に見つける必要があります。このためには、様々な環境に対応できる柔軟な認識能力を備えた技術開発が不可欠です。
現在、多くの研究者がこれらの課題に取り組んでおり、Faster R-CNNを土台にした新しい技術が次々と生まれています。これらの技術革新は、物体検出技術をより進化させ、私たちの生活を大きく変える可能性を秘めています。近い将来、より安全で便利な社会の実現に貢献していくことでしょう。
| 課題 | 説明 | 応用例 |
|---|---|---|
| 速度向上 | 動画などの連続した画像から瞬時に物体を検出 | 動画解析 |
| 精度向上 | 人、車、信号などを正確に認識し誤認識を減らす | 自動運転 |
| 軽量化 | 少ない計算資源で動作し、スマートフォンや小型機器でも利用可能にする | 製造ラインでの不良品検出、見守りロボット |
| 環境対応 | 複雑な背景や照明条件でも正確に検出 | 夜間や物が重なっている状況での認識 |