
シミュレーションから現実世界へ:sim2real入門

AIを知りたい
先生、『sim2real』って言葉の意味がよくわからないんです。教えてもらえますか?

AIエンジニア
sim2realは、『模擬』と『現実』という意味の言葉を組み合わせた言葉だよ。パソコン上の模擬実験で学習させた人工知能を、現実世界で使えるようにする技術のことなんだ。
AIを知りたい
現実世界で学習させるのと何が違うんですか?
AIエンジニア
現実世界で人工知能に学習させると、時間もお金もたくさんかかるよね。sim2realならパソコン上で色々な状況を作って学習させられるから、安く早く学習させることができるんだよ。
sim2realとは。
『現実世界への応用』という人工知能にまつわる言葉について説明します。これは、コンピュータ上で模擬実験を行い、そこで学習させた結果を現実世界で活用する、という学習方法の一つです。実際に現実世界で学習させるよりも、手軽に様々な状況を作り出せるため、費用を抑えて実現できるという利点があります。
仮想と現実の橋渡し

仮想世界と現実世界を繋ぐ技術、それが仮想と現実の橋渡しです。この技術は、仮想空間での模擬実験で鍛えられた学習模型を、現実世界の問題解決に役立てる方法です。試行錯誤を通して学習を進める強化学習において、この技術は革新的な役割を担っています。
現実世界での試行錯誤は、多くの場合、時間や費用、安全性の面で大きな制約を受けます。例えば、ロボットの動作学習を現実世界の工場で行う場合、ロボットが誤動作すれば、装置の破損や作業員の怪我に繋がる可能性があります。また、学習に長時間を要すれば、その間の工場の稼働停止による損失も大きくなります。
しかし、仮想と現実の橋渡し技術を使えば、仮想空間で安全かつ低価格で様々な状況を作り出し、試行錯誤を繰り返すことができます。仮想空間では、ロボットが装置に衝突しても現実世界のような損害は発生しませんし、何度でもやり直しが可能です。また、時間を早送りすることもできるので、長期間の学習も短時間で完了できます。このように、現実世界の実験に伴う危険や費用を大幅に減らしながら、効果的な学習模型を構築できます。
具体的には、仮想空間で精巧な工場の模型を作り、そこでロボットの動作学習を行います。仮想空間での学習で十分な成果が得られたら、その学習結果を現実世界のロボットに適用します。もちろん、仮想世界と現実世界には差異があるため、そのままではうまくいかない場合もあります。そこで、仮想空間と現実世界の差を埋めるための工夫も必要となります。例えば、仮想空間での模擬実験データに現実世界のデータを少し加えて学習させたり、現実世界の状況に合わせて仮想空間の環境を調整したりするといった工夫です。このように、仮想と現実の橋渡し技術は、現実世界の問題解決に大きく貢献する、まさに仮想と現実の橋渡し役と言えるでしょう。
手軽な環境構築

仮想空間での環境設定は、現実世界での実験環境を作るのに比べて、はるかに手軽で便利です。現実世界で実験をしようとすると、場所の確保、機材の購入、環境整備など、多くの手間と費用がかかります。例えば、ロボットの動作実験をする場合、実験用の広い場所を確保し、ロボットやセンサー、その他必要な機材を購入し、それらを適切に配置、設定する必要があります。さらに、実験条件を変えるたびに、これらの作業を繰り返す必要があり、時間と費用がかさみます。天候や照明条件を細かく制御しようとなると、さらに大掛かりな装置と費用が必要になるでしょう。
一方、仮想空間であれば、こうした負担は大幅に軽減されます。コンピュータ上でシミュレーション環境を構築することで、場所の確保や機材の購入といった物理的な制約から解放されます。天候や照明、物体の配置といった実験条件も、プログラムの数値を変更するだけで自在に操ることができ、多様な状況を容易に再現できます。例えば、晴天から雨天への変更、昼から夜への変更なども、簡単な操作で瞬時に実現できます。現実世界では再現が難しい、あるいは危険を伴う実験も、仮想空間であれば安全に実施できます。
この手軽さは、試行錯誤を繰り返す必要がある学習モデルの開発において大きなメリットとなります。様々な条件下で繰り返し実験を行い、その結果を基にモデルを改良していく過程で、仮想環境の柔軟性と迅速性は開発効率を大幅に向上させます。現実世界では数日かかるような実験も、仮想環境では数時間で完了できる場合もあり、開発期間の短縮に繋がります。また、多様な条件下での実験が容易になることで、より頑健で汎用性の高い学習モデルの開発を促進します。
| 項目 | 現実世界 | 仮想空間 |
|---|---|---|
| 手軽さ | 手間と費用がかかる | 手軽で便利 |
| 場所 | 広い場所の確保が必要 | コンピュータ上で構築、物理的制約なし |
| 機材 | ロボット、センサーなどの購入が必要 | 不要 |
| 環境設定 | 環境整備、配置設定が必要 | プログラムの数値変更で自在に操作可能 |
| 条件変更 | 時間と費用がかかる | 簡単、迅速 |
| 天候・照明制御 | 大掛かりな装置と費用が必要 | 簡単な操作で変更可能 |
| 危険な実験 | 困難、危険 | 安全に実施可能 |
| 学習モデル開発 | 時間と費用がかかる、効率が悪い | 試行錯誤が容易、開発効率向上、開発期間短縮 |
| 実験多様性 | 限られる | 多様な条件下での実験が容易 |
| 学習モデルの質 | 限定的 | 頑健で汎用性の高いモデル開発促進 |
低コストでの実装

現実世界で新しい技術を試すには、多くの費用と危険が伴います。例えば、ロボットの動作確認試験を行う場合、誤動作によってロボットが壊れてしまったり、場合によっては近くにいる人に怪我をさせてしまうかもしれません。このような事態を防ぐため、試験は慎重に進める必要がありますが、そうすると時間と手間がかかり、費用もかさみます。ロボットの部品代や修理費、実験場所の確保、安全対策のための設備投資など、多額の費用が必要となるでしょう。
このような問題を解決する一つの方法が、仮想空間でのシミュレーション、いわゆるsim2real技術です。sim2realとは、シミュレーションで得られた結果を現実世界に適用する技術のことです。仮想空間で試験を行うため、現実世界で行う場合に比べて費用を大幅に削減できます。ロボットが壊れても、仮想空間上なので修理費用は発生しませんし、人への危害もありません。安全対策のための設備投資も不要です。さらに、一度シミュレーション環境を構築してしまえば、何度でも繰り返し実行できます。現実世界では、毎回同じ条件で実験を行うことは困難ですが、仮想空間であれば容易に再現できます。
sim2real技術を用いることで、限られた予算内で多くの試行錯誤を行うことができます。現実世界では費用や安全性の問題から試行回数が限られてしまいますが、仮想空間であれば様々な条件下で自由に実験ができます。これにより、学習モデルの精度向上に集中的に取り組むことができ、より良い成果を期待できます。また、現実世界では試行錯誤に多くの時間が必要ですが、sim2realなら短期間で多くの実験を実施できます。そのため、開発期間の短縮にもつながります。sim2real技術は、費用を抑えつつ効率的に開発を進めるための強力な手段と言えるでしょう。
| 項目 | 現実世界での試験 | sim2real(仮想空間でのシミュレーション) |
|---|---|---|
| 費用 | 高額(ロボットの部品代、修理費、実験場所の確保、安全対策のための設備投資など) | 大幅に削減 |
| 安全性 | 危険(ロボットの誤動作による損害、人への危害) | 安全(仮想空間上なので損害や危害なし) |
| 試行錯誤 | 費用と安全性の問題から試行回数が限られる | 様々な条件下で自由に実験可能、多くの試行錯誤が可能 |
| 再現性 | 毎回同じ条件で実験を行うことが困難 | 容易に再現可能 |
| 開発期間 | 長期間 | 短縮可能 |
| 学習モデルの精度 | 試行錯誤の制限により向上に時間がかかる | 集中的に取り組むことができ、より良い成果を期待できる |
様々な応用事例

近年、現実世界の問題を仮想空間で解決する技術が注目を集めています。この技術は、仮想空間でのシミュレーション結果を現実世界に適用することで、様々な分野で革新をもたらしています。
例えば、ロボットの分野を考えてみましょう。ロボットアームに複雑な動作を教え込むためには、従来は試行錯誤を繰り返す必要がありました。しかし、仮想空間で様々な物体の掴み方を学習させ、その結果を現実世界のロボットに反映させることで、より効率的に複雑な作業を自動化できるようになりました。仮想空間では、現実世界では危険を伴うような動作も安全に試すことができ、学習速度も格段に向上します。
自動運転技術の開発にも、この技術は大きく貢献しています。現実世界の道路で様々な状況を想定した走行試験を行うことは、時間と費用がかかるだけでなく、安全性にも課題があります。しかし、仮想空間であれば、多様な交通状況や天候条件を再現し、安全に運転技術を学習させることができます。これにより、現実世界の事故を未然に防ぎ、安全な自動運転の実現に近づけるのです。
製造業においても、この技術は生産性向上に役立っています。仮想空間で生産ラインの動作をシミュレーションすることで、ボトルネックの発見や最適な配置の検討が可能になります。また、製品の品質管理にも応用でき、不良品の発生を抑制し、生産効率の向上とコスト削減を同時に実現できます。このように、仮想空間と現実世界を繋ぐ技術は、様々な産業で大きな可能性を秘めており、今後の発展が期待されています。
| 分野 | 仮想空間でのシミュレーション | 現実世界への適用 | メリット |
|---|---|---|---|
| ロボット | 様々な物体の掴み方を学習 | 複雑な動作を効率的に自動化 | 危険な動作の安全な試行、学習速度向上 |
| 自動運転 | 多様な交通状況や天候条件下での走行試験 | 安全な運転技術の学習 | 事故防止、安全な自動運転の実現 |
| 製造業 | 生産ラインの動作シミュレーション、製品の品質管理 | ボトルネック発見、最適配置検討、不良品抑制 | 生産性向上、コスト削減 |
課題と展望

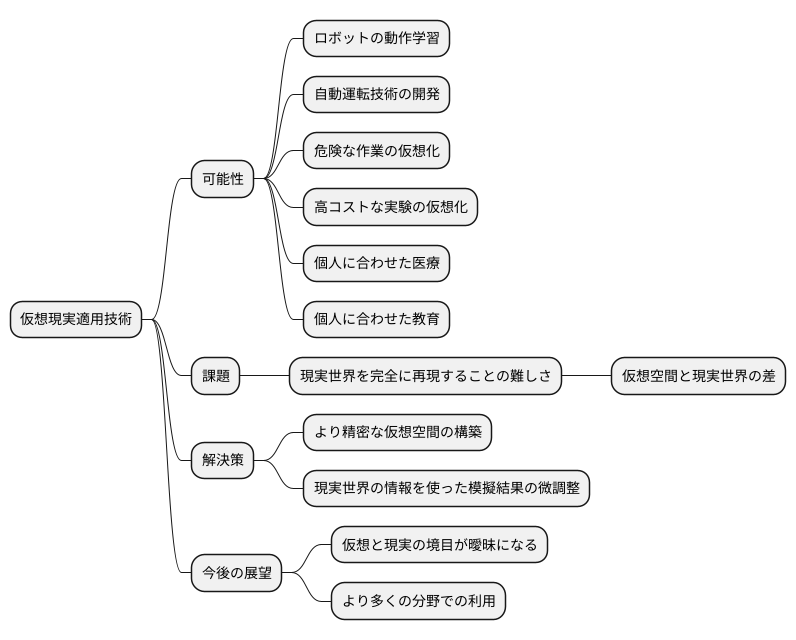
仮想空間で模擬実験を行い、その結果を現実世界に適用する技術、すなわち仮想現実適用技術は、大きな可能性を秘めていますが、いくつかの課題も抱えています。現実世界を仮想空間で完全に再現することの難しさが、最大の課題と言えるでしょう。仮想空間は、どうしても現実世界の複雑さを全て写し取ることができません。そのため、仮想空間で学習させた模擬実験の結果が、現実世界ではうまくいかないケースも出てきます。
この仮想世界と現実世界の差を埋めるためには、より精密な仮想空間の構築が必要です。現実世界をより忠実に再現できる仮想空間を作ることで、模擬実験の精度を高めることができます。また、現実世界の情報を使った模擬結果の微調整も重要です。仮想空間での実験結果を、現実世界の情報を使って補正することで、現実世界への適用可能性を高めることができます。
今後の研究開発によって、これらの課題が解決され、仮想現実適用技術がより多くの分野で利用されることが期待されます。仮想空間を作る技術の進歩や、現実世界の情報を集める技術の向上により、仮想と現実の境目はますます曖昧になっていくでしょう。そして、仮想現実適用技術は、より強力な道具となるはずです。例えば、ロボットの動作学習や自動運転技術の開発など、様々な分野で応用が進むと考えられます。危険な作業や高コストな実験を仮想空間で行うことで、安全性の向上や費用削減にも繋がります。さらに、個人に合わせた医療や教育など、パーソナルな分野への応用も期待されます。仮想現実適用技術は、私たちの社会を大きく変える可能性を秘めているのです。
より良い未来に向けて

より良い未来を目指す上で、仮想世界と現実世界を繋ぐ技術は欠かせないものとなりつつあります。この技術は、模擬実験で得た学びを現実世界の問題解決に役立てる画期的な手法であり、様々な分野で大きな期待が寄せられています。
例えば、人の手で作業していた工場の組み立て工程を自動化するロボットの開発において、この技術は力を発揮します。ロボットの動きを仮想空間で何度も試行錯誤することで、実機を使うよりも低い費用で効率的に学習させることができます。また、自動運転技術の開発においても、仮想空間での走行訓練は、現実世界では再現が難しい様々な状況を想定した学習を可能にし、安全性の向上に大きく貢献します。その他、製造業における製品開発や、災害時の避難経路シミュレーションなど、応用範囲は多岐に渡り、私たちの生活をより豊かに、より安全なものへと変えていく可能性を秘めています。
もちろん、仮想世界と現実世界の差異を完全に埋めることは容易ではありません。仮想空間で完璧に動作するロボットが、現実世界ではうまく動かないといった課題も存在します。しかし、より精密な模擬実験技術や、現実世界の情報を効果的に活用する技術の進歩により、この差は少しずつ縮まってきています。今後、この技術が進化し、より実用的なものとなることで、想像をはるかに超える未来社会が実現するかもしれません。仮想世界と現実世界の融合は、まさに未来の鍵となる技術と言えるでしょう。
| 分野 | 仮想世界と現実世界を繋ぐ技術の活用例 | メリット |
|---|---|---|
| 工場の自動化 | ロボットの組み立て工程のシミュレーション | 低費用で効率的なロボット学習 |
| 自動運転技術 | 仮想空間での走行訓練 | 様々な状況を想定した安全性の向上 |
| 製造業 | 製品開発 | – |
| 防災 | 災害時の避難経路シミュレーション | – |