ドメインランダマイゼーションで実世界へ

AIを知りたい
先生、「ドメインランダマイゼーション」って、難しそうです。簡単に説明してもらえますか?

AIエンジニア
そうだね。たとえば、ロボットに物を掴む訓練をさせたいとしよう。でも、現実世界で訓練させるのは大変だから、コンピュータの中で練習させるよね。これがシミュレーションだ。ドメインランダマイゼーションは、このコンピュータの中の練習環境を毎回ガラッと変えることなんだ。
AIを知りたい
コンピュータの中の環境を変える、というのは具体的にどういうことですか?
AIエンジニア
物の色や形、光の当たり方、重力なんかを毎回ランダムに変えるんだ。そうすると、ロボットはどんな環境でも対応できるようになる。現実世界では何が起こるかわからないから、色々な状況に対応できるようにしておくことが大切なんだよ。
ドメインランダマイゼーションとは。
人工知能に関わる言葉である「ドメインランダマイゼーション」について説明します。ドメインランダマイゼーションとは、模擬実験と現実世界をつなぐ場面で、模擬実験の設定を様々に変えながら学習を進める方法のことです。模擬実験と現実世界の間にはどうしても違いが出てきてしまい、これが原因で、せっかく作った模型の正確さが落ちてしまうことがあります。この問題を「リアリティギャップ」と呼びますが、ドメインランダマイゼーションはこの問題を解決するために用いられます。
はじめに

近年、人工知能技術はめざましい発展を遂げ、さまざまな分野で活用されています。特に、深層学習と呼ばれる技術は、画像認識や音声認識といった分野で目覚ましい成果を上げており、ロボット制御の分野でも盛んに研究開発が行われています。ロボットを思い通りに動かすためには、高度な制御技術が必要不可欠です。従来の制御方法では、複雑な動作をさせることが難しかったり、環境の変化に柔軟に対応できなかったりするといった課題がありました。そこで、深層学習を用いた制御手法が注目されているのです。
深層学習を用いることで、複雑な環境におけるロボットの制御をより高度なものにすることが期待されています。しかし、実世界のロボットを使って深層学習モデルを訓練するには、膨大な時間と費用がかかります。例えば、ロボットが転倒したり、壁に衝突したりするなど、実機での試行錯誤はロボットの損傷にもつながる可能性があります。また、学習データの収集にも多くの時間を要するため、効率的な学習が難しいという問題もあります。そこで、現実世界の問題を解決するために、仮想空間で訓練を行う手法が登場しました。これがシミュレーション環境でモデルを訓練し、実世界に適用するsim2realという手法です。sim2realでは、コンピュータ上に構築した仮想空間で、ロボットの動作を模擬的に再現します。この仮想空間で生成されたデータを用いて深層学習モデルを学習させ、実ロボットでの制御に利用します。この手法を用いることで、コストと時間の削減に大きく貢献することができます。
しかし、sim2realにはリアリティギャップと呼ばれる問題が存在します。これは、シミュレーション環境と現実世界の間にはどうしても違いが生じてしまい、この違いがモデルの性能低下を招く原因となるのです。例えば、シミュレーションでは摩擦や空気抵抗などを完全に再現することはできません。また、現実世界では予期せぬ出来事が起こる可能性がありますが、シミュレーションでは想定外の状況を再現することは困難です。このようなシミュレーションと現実世界の差異をいかに埋めるかが、sim2real技術の課題となっています。リアリティギャップを克服し、シミュレーションで学習した成果を現実世界で最大限に活かすための研究が、現在も盛んに行われています。
リアリティギャップへの挑戦

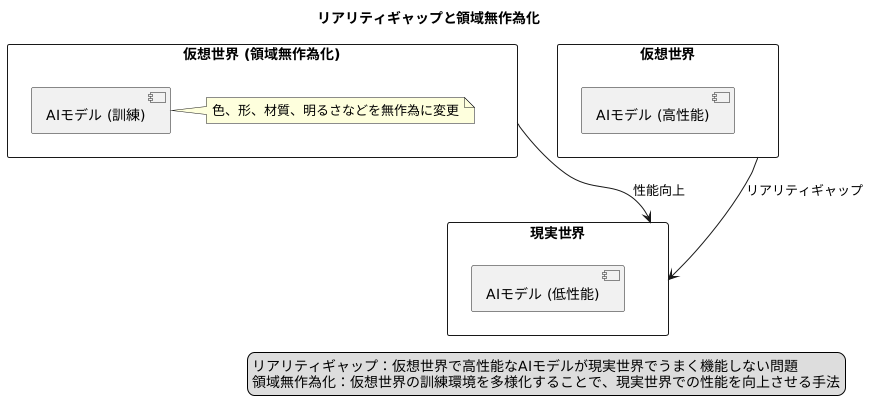
仮想世界と現実世界の差、いわゆるリアリティギャップの問題は、人工知能の研究開発における大きな課題です。仮想空間で高い性能を示すモデルが、現実世界ではうまく機能しないということがしばしば起こります。この問題への対策として、様々な試みがなされていますが、その中でも有効な手法の一つが「領域無作為化」、つまりドメインランダマイゼーションです。
領域無作為化は、仮想空間での訓練時に、様々な環境を作り出すことで、現実世界での性能向上を目指す手法です。具体的には、仮想空間のパラメータを変化させることで、多様な環境を生成します。例えば、物体の色や形、材質の摩擦の大きさ、明るさなどを無作為に変化させます。仮想空間での訓練時に、物体の色はいつも同じではなく、青や赤、緑など様々な色に変化し、形も丸や四角、三角など多様な形を取り得ます。また、物体の表面の摩擦の大きさや、明るさも都度変化します。このように様々な環境で訓練を行うことで、特定の環境に過剰に適応することを防ぎ、現実世界でも通用する能力を獲得させます。
例えて言うなら、野球の練習で、常に同じ速度、同じコースの球しか投げられないピッチングマシンで練習するよりも、速度やコースが変化する、より現実の試合に近い状況で練習する方が、試合で良い結果を残せる可能性が高くなります。領域無作為化もこれと同じ考え方で、多様な環境を仮想空間で再現することで、現実世界での性能向上を図るのです。これにより、現実世界で遭遇する様々な状況にも対応できる、より柔軟で汎用的な人工知能モデルの開発が可能になります。
手法の詳細
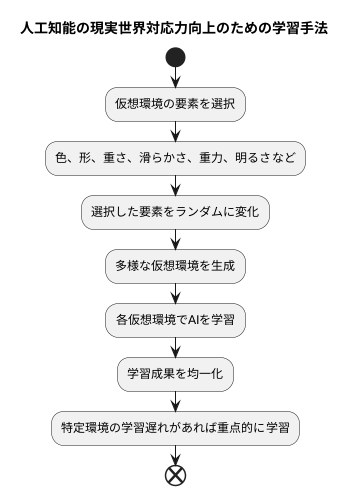
この手法を詳しく見ていきましょう。この手法は、仮想環境における様々な要素を変化させることで、訓練された人工知能の現実世界への対応力を高めることを目指しています。
まず、仮想環境の中で変化させる要素を選びます。挙げられるものとしては、物体の色や形、重さ、表面の滑らかさ、重力の強さ、明るさなど、多岐に渡ります。これらの要素を適切に選択することが、現実世界への対応力を高める上で非常に重要です。
次に、選んだ要素をランダムに変化させながら、仮想環境を作り出します。例えば、ある時は赤い球体、またある時は青い立方体といったように、物体の色や形を都度変えます。重力の強さや明るさも同様に、毎回異なる値に設定します。このようにして、多様な仮想環境を生成します。
そして、生成された様々な仮想環境で人工知能に学習をさせます。この学習過程では、各環境での学習成果が均一になるように調整することが重要です。もし特定の環境での学習が遅れている場合は、その環境での学習に重点を置くことで、人工知能がどの環境にも対応できるようにします。
このように、多様な仮想環境で学習させることで、人工知能は特定の環境に過度に適応してしまうことを防ぎ、より柔軟で汎用性の高い能力を身につけることができます。これにより、現実世界での様々な状況にも対応できる、頑健な人工知能を育成することが可能になります。
適用事例

様々な分野で活用されている適用事例について、より詳しく説明します。
まず、ロボットが物を掴む作業を例に挙げましょう。この作業をうまく行うためには、物の色や形、材質など、様々な条件に対応できる必要があります。そこで、訓練の段階で、物の色や形、材質などを意図的に変化させます。例えば、青い積み木を掴む訓練をする際に、積み木の形を立方体や円柱に変えたり、材質を木や金属、プラスチックに変えたり、色を赤や緑に変えたりすることで、どんな物でも掴める能力をロボットに身につけさせることができます。
次に、移動ロボットが目的地まで移動する作業の例を説明します。この作業では、予期せぬ障害物や照明の変化など、様々な状況に対応できる必要があります。訓練の段階で、障害物の配置を様々に変えたり、明るい場所や暗い場所など、照明条件を変えたりすることで、どんな状況でも目的地まで移動できる能力をロボットに身につけさせることができます。
自動運転の分野でも、この技術は役立ちます。訓練の段階で、天候や道路状況、周りの車の動きなどを様々に変えることで、現実世界で起こりうる様々な状況に対応できる自動運転システムを作ることができます。
無人飛行機の操縦でも、この技術は応用されています。訓練の段階で、風向きや風速、気圧などを様々に変えることで、現実世界の複雑な気象条件に対応できる無人飛行機の操縦システムを作ることができます。
このように、訓練の段階で現実世界で起こりうる様々な状況を想定して訓練することで、現実世界との差を縮め、より実用的なシステムを作ることができます。この技術は、シミュレーションと現実世界の差を埋めるための有効な手段として、様々な分野で活用が期待されています。
| 分野 | タスク | 訓練データのバリエーション |
|---|---|---|
| ロボット工学 | 物をつかむ | 物の色、形、材質(例:青、赤、緑の立方体、円柱、木、金属、プラスチック) |
| 移動ロボット | 目的地への移動 | 障害物の配置、照明条件(明るい場所、暗い場所) |
| 自動運転 | 運転 | 天候、道路状況、周りの車の動き |
| 無人飛行機操縦 | 飛行 | 風向き、風速、気圧 |
今後の展望

現実世界と仮想世界の差異を埋める技術として、模擬環境での学習成果を現実世界に適用する試みは、人工知能開発の重要な課題です。この課題に対し、模擬環境のパラメータを変化させることで、現実世界に近い多様な環境を人工的に作り出す「領域無作為化」という手法が注目されています。
領域無作為化は、仮想環境の見た目や物理法則などを調整することで、現実世界との差を縮める効果的な方法です。例えば、仮想空間の色合いや物体の配置、摩擦係数や重力などを無作為に変化させることで、多様な状況を作り出し、現実世界での環境変化にも対応できる人工知能の学習を目指します。これにより、仮想環境で学習した人工知能が現実世界でもうまく動作する可能性を高めます。
しかし、領域無作為化にはまだ改善の余地があります。具体的には、変化させるパラメータの種類や変化の範囲をどのように設定するかが課題です。現状では、最適な設定を見つけるために多くの試行錯誤が必要であり、時間と労力がかかります。この問題を解決するために、パラメータの設定を自動的に最適化する技術の開発が期待されています。また、領域無作為化は多くの計算資源を必要とするため、計算効率の向上も重要な課題です。より少ない計算量で効果的に学習できる方法の開発が求められています。
これらの課題が解決され、領域無作為化の技術がさらに進歩すれば、仮想環境での学習成果を現実世界により良く適用できるようになります。これは、人工知能の性能向上に大きく貢献し、ロボット工学や自動運転技術など、様々な分野での応用が期待されます。将来的には、より高度で複雑なタスクをこなせる人工知能の実現につながるでしょう。そのため、領域無作為化は人工知能開発における重要な技術として、更なる研究開発が期待されています。
| 項目 | 説明 |
|---|---|
| 技術概要 | 模擬環境のパラメータを変化させる「領域無作為化」により、現実世界に近い多様な環境を人工的に作り出し、AIの学習成果を現実世界に適用する試み。 |
| 手法 | 仮想環境の見た目(色合い、物体の配置など)や物理法則(摩擦係数、重力など)を無作為に変化させる。 |
| 目的 | 現実世界との差を縮め、環境変化に対応できるAIを学習させることで、仮想環境での学習成果の現実世界への適用可能性を高める。 |
| 課題 |
|
| 解決策 |
|
| 将来展望 |
|
まとめ

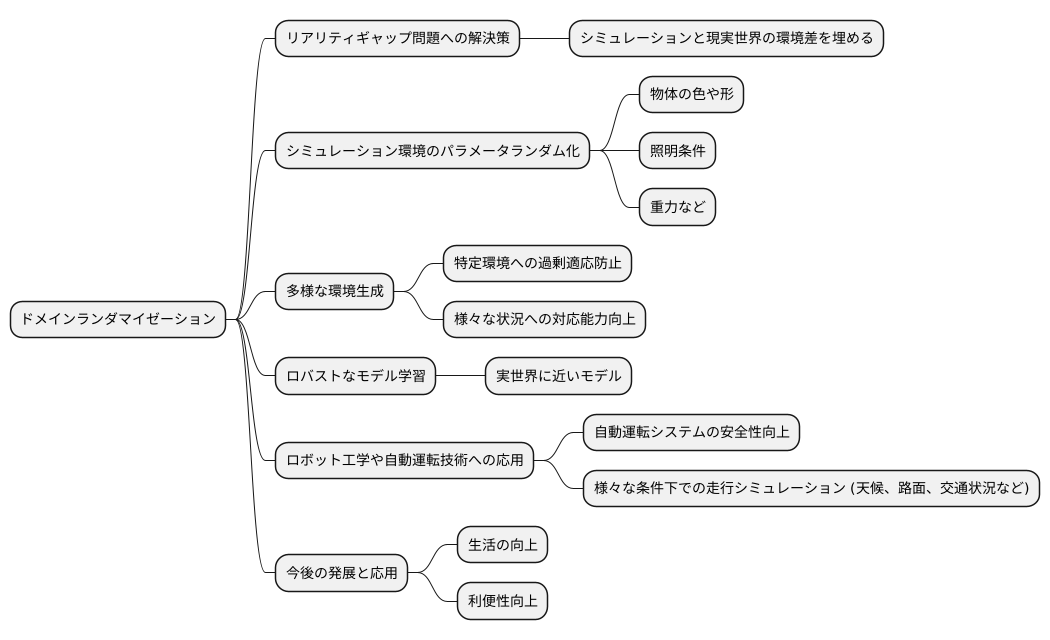
近年の技術革新により、人工知能やロボット工学は目覚ましい発展を遂げています。しかし、シミュレーション環境で学習させたモデルを実世界に適用する際、その性能が大きく低下するという問題がしばしば発生します。これは「リアリティギャップ」と呼ばれる問題であり、シミュレーションと現実世界の環境差に起因するものです。この問題を解決する有望な手法の一つとして、ドメインランダマイゼーションが注目を集めています。
ドメインランダマイゼーションは、シミュレーション環境のパラメータをランダムに変化させることで、多様な環境を人工的に作り出す技術です。例えば、物体の色や形、照明条件、重力などをランダムに変化させることで、シミュレーション環境に多様性を生み出します。これにより、モデルは特定の環境に過剰に適応することなく、様々な状況に対応できる能力を獲得します。結果として、実世界により近い、よりロバストなモデルを学習させることが可能になります。
この技術は、ロボット工学や自動運転技術の発展に大きく貢献すると期待されています。例えば、シミュレーション環境で学習させた自動運転システムを実車に搭載する場合、現実の道路状況はシミュレーションとは大きく異なるため、そのままでは安全な走行は難しいでしょう。しかし、ドメインランダマイゼーションを用いることで、天候や路面状況、交通状況など、様々な条件下での走行をシミュレーションし、より現実世界に近い状況で学習させることができます。これにより、実世界での安全性を高め、信頼性の高い自動運転システムの開発に繋がると考えられます。
ドメインランダマイゼーションは、シミュレーションと現実世界の橋渡しをする重要な技術であり、今後の研究による更なる発展と応用が期待されます。この技術の進歩は、私たちの生活をより豊かに、より便利なものへと変えていく可能性を秘めています。