
ドメインランダマイゼーション:シミュレーションと現実のギャップを埋める

AIを知りたい
先生、「ドメインランダマイゼーション」って、複雑な名前ですが、一体どんなものなんですか?

AIエンジニア
そうだね、難しそうな名前だけど、簡単に言うと、コンピュータの中で作った仮想世界を、わざと色んなパターンで変化させて学習させる方法のことだよ。 例えば、仮想世界の中で、ボールの色や大きさ、重力の強さなどを毎回ランダムに変えるんだ。
AIを知りたい
どうしてそんなことをするんですか?
AIエンジニア
それはね、仮想世界で学習したことを現実世界でうまく使えるようにするためだよ。仮想世界と現実世界は違うから、仮想世界で完璧にできたとしても、現実世界ではうまくいかないことがある。色んな仮想世界で練習することで、現実世界でも対応できるようになるんだ。
ドメインランダマイゼーションとは。
人工知能に関わる言葉である「ドメインランダマイゼーション」について説明します。ドメインランダマイゼーションとは、模擬実験と現実世界をつなぐ場面で、模擬実験の設定をいろいろとランダムに変えて、色々な状況で学習させる方法のことです。これは、模擬実験と現実世界の差によって、作った模型の正確さが落ちてしまう「リアリティギャップ」と呼ばれる問題を解決するために行います。
はじめに

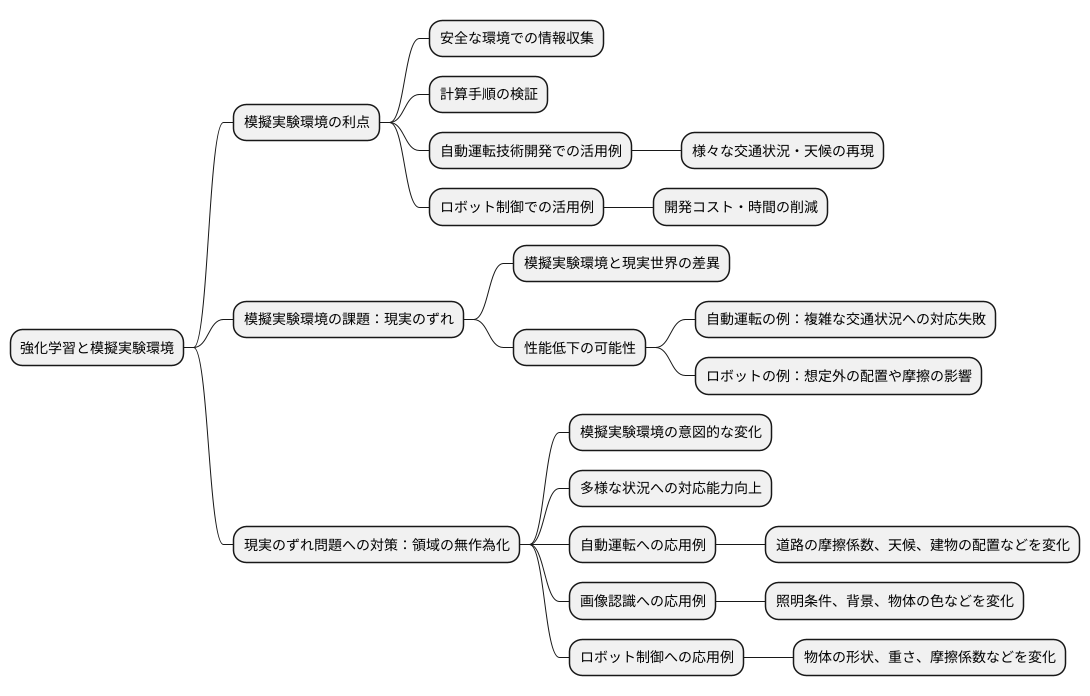
人工知能、とりわけ強化学習という分野では、現実の世界が抱える課題を解決するために、模擬実験の環境がよく使われています。この模擬実験環境は、現実の世界では難しかったり、危険が伴ったりする状況を安全に再現できるため、情報の収集や計算手順の検証にとても役立ちます。例えば、自動運転技術の開発では、模擬実験環境で様々な交通状況や天候を再現し、安全に自動運転アルゴリズムをテストすることができます。また、ロボットの制御においても、実機を使う前に模擬実験環境で動作確認を行うことで、開発コストや時間を削減することができます。
しかし、模擬実験環境と現実の世界の間には、どうしても違いが生じてしまいます。この違いは、現実世界での模型の性能低下につながることがあります。具体的には、模擬実験環境ではうまく動作していた自動運転車が、現実世界の複雑な交通状況に対応できず、事故につながる可能性があります。また、ロボットも、模擬実験環境では想定していなかった物体の配置や摩擦の影響を受け、うまく動作しない可能性があります。このような、模擬実験環境と現実世界との間の違いによって生じる問題を「現実のずれ」と呼び、人工知能研究における大きな課題となっています。
この「現実のずれ」問題を小さくするための有望な方法の一つが、領域の無作為化です。領域の無作為化とは、模擬実験環境を意図的に変化させることで、多様な状況に対応できる人工知能モデルを学習させる手法です。例えば、自動運転の模擬実験環境では、道路の摩擦係数や天候、周囲の建物の配置などを変化させることで、様々な状況に対応できる自動運転アルゴリズムを学習させることができます。このように、領域の無作為化は、人工知能モデルの汎化性能を高め、「現実のずれ」問題を軽減する上で重要な役割を果たします。具体的には、画像認識において、照明条件や背景、物体の色などを変化させることで、様々な環境でも物体を正確に認識できる人工知能モデルを学習できます。また、ロボット制御においても、物体の形状や重さ、摩擦係数などを変化させることで、多様な物体を取り扱えるロボットを開発できます。
ドメインランダマイゼーションとは

物が置かれた場所や周りの明るさ、物の重さ、触えた時の滑りやすさといった周りの状態は常に変化します。このような変化の激しい現実世界でうまく動くためには、機械も様々な状況に対応できるようになる必要があります。ドメインランダマイゼーションとは、機械に様々な状況を経験させて学習させるための方法です。
簡単に言うと、コンピュータ上で作った仮想世界の色や形、明るさ、重さ、滑りやすさといった様々な要素をランダムに、つまりでたらめに変化させるのです。例として、ロボットアームが物を掴む訓練をする場面を想像してみましょう。従来のやり方では、仮想世界の色や形などは決まったままでした。しかし、現実世界では物の色や形は様々です。そこで、ドメインランダマイゼーションを使って、仮想世界の中で物の色や形を訓練の度にランダムに変化させます。
こうすることで、ロボットアームは様々な色や形の物を掴む訓練をすることになり、現実世界で初めて見る物でも掴める可能性が高まります。まるで、子供が多様な遊具に触れることで、どんな遊具でも遊び方を工夫して楽しめるようになるのと同じです。
ドメインランダマイゼーションの利点は、仮想世界で訓練した機械が現実世界でもうまく動作する可能性を高められることです。仮想世界と現実世界の間にはどうしても違いが生じますが、様々な状況を経験することで、その違いにうまく対応できるようになるからです。例えば、自動運転技術の開発にもドメインランダマイゼーションが活用されています。仮想世界で天候や道路状況をランダムに変化させることで、現実世界のどんな状況でも安全に運転できる車の開発を目指しています。
| 手法 | 概要 | 例 | 利点 | 応用分野 |
|---|---|---|---|---|
| ドメインランダマイゼーション | コンピュータ上で作った仮想世界の色や形、明るさ、重さ、滑りやすさといった様々な要素をランダムに変化させることで、機械に様々な状況を経験させて学習させる方法。 | ロボットアームが物を掴む訓練をする際に、仮想世界の中で物の色や形を訓練の度にランダムに変化させる。 | 仮想世界で訓練した機械が現実世界でもうまく動作する可能性を高められる。 | 自動運転技術の開発など |
リアリティギャップ問題への対策

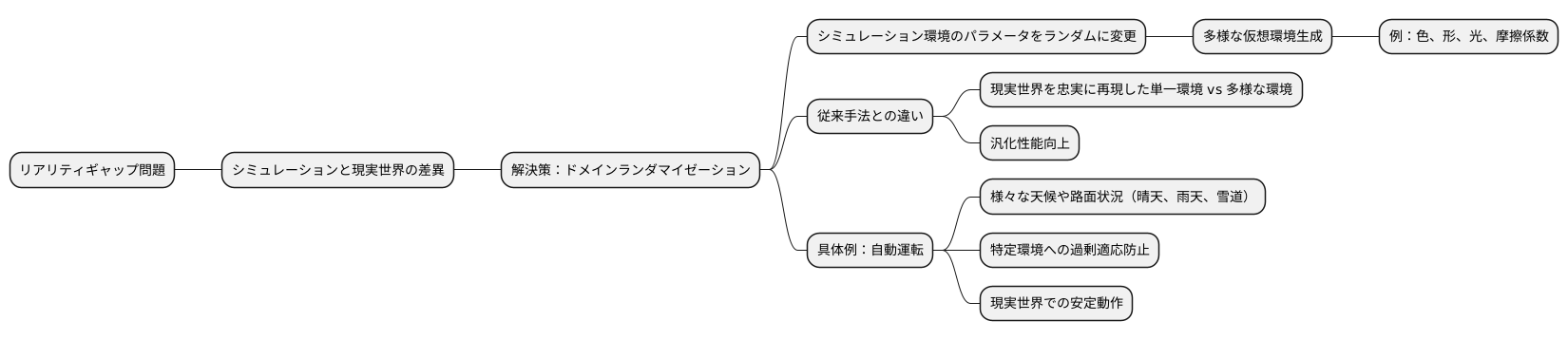
現実世界でのロボット制御や自動運転技術の開発において、シミュレーションは重要な役割を担っています。しかし、シミュレーション環境で学習したモデルは、現実世界ではうまく動作しないことがしばしばあります。これがリアリティギャップ問題です。この問題への対策として、ドメインランダマイゼーションという手法が注目を集めています。
ドメインランダマイゼーションとは、シミュレーション環境のパラメータをランダムに変更することで、多様な仮想環境を生成する手法です。例えば、物体の色や形、光の当たり方、摩擦係数など、様々な要素を変化させることができます。これらのパラメータをランダムに変化させることで、シミュレーション環境と現実世界の差異を吸収することが期待できます。
従来のシミュレーションベースの学習では、現実世界を忠実に再現した単一の環境を構築しようと試みるのが一般的でした。しかし、現実世界を完全に再現することは非常に困難です。ドメインランダマイゼーションでは、一つの完璧な環境を作る代わりに、多様な環境を生成することで、モデルの汎化性能を高めます。つまり、現実世界で見られるような、シミュレーションでは想定していなかった状況にも対応できるようになります。
具体例として、自動運転の学習を想定してみましょう。シミュレーション環境で、様々な天候や路面状況を再現することで、現実世界で遭遇する可能性のある様々な状況に対応できるモデルを学習できます。晴天、雨天、雪道など、様々な条件下で学習することで、特定の環境に過剰に適応してしまうことを防ぎ、現実世界での安定した動作を実現できる可能性が高まります。このように、ドメインランダマイゼーションは、リアリティギャップ問題を克服するための有効な手段として、今後の更なる発展が期待されています。
適用事例

色々な分野で活用されている技術に、領域無作為化というものがあります。これは、訓練の場となる模擬環境を多様に変えることで、現実世界での複雑な状況に対応できる能力を育む技術です。
例えば、自動運転の分野を考えてみましょう。自動運転車は、様々な天候や道路状況に対応できる必要があります。そこで、領域無作為化を用いて、模擬環境での天候や道路状況を様々に変化させながら車両制御の方法を学習させます。晴天の舗装路だけでなく、雨天の未舗装路や雪道の状況も模擬環境に組み込むことで、現実世界で起こりうる様々な状況に対応できる自動運転車の制御方法を学習させることができます。
ロボット工学の分野でも、この技術は活用されています。ロボットアームの制御や物の認識といった作業を学習させる際に、領域無作為化が用いられています。例えば、ロボットアームに物を掴ませる訓練を行うとします。この時、物の形や大きさ、材質などを様々に変化させた模擬環境で訓練を行うことで、現実世界にある多様な物体を正確に掴むことができるようになります。また、物の認識においても、照明条件や物の位置などを変化させた模擬環境で訓練することで、現実世界での複雑な状況でも物体を正確に認識できるようになります。
さらに、医療分野への応用も期待されています。手術ロボットの制御や診断支援といったシステム開発に、領域無作為化の技術が役立つと考えられています。例えば、手術ロボットの制御においては、患者の体格や臓器の位置といった情報を様々に変化させた模擬環境で訓練を行うことで、実際の手術においても正確な操作ができるように学習させることができます。また、診断支援システムにおいては、様々な症状の患者データを模擬環境に組み込むことで、より正確な診断を支援するシステムの開発が可能になります。このように、領域無作為化は様々な分野で応用され、技術の発展に貢献しています。
| 分野 | 活用例 | 領域無作為化による効果 |
|---|---|---|
| 自動運転 | 車両制御 | 天候や道路状況の変化に対応できる自動運転車の制御方法を学習 |
| ロボット工学 | ロボットアーム制御、物の認識 | 多様な物体を掴む、複雑な状況でも物体を正確に認識 |
| 医療 | 手術ロボット制御、診断支援 | 実際の手術における正確な操作、より正確な診断支援 |
利点と欠点

物事には表と裏があるように、ドメインランダマイゼーションにも利点と欠点が存在します。まず、この技術の大きな利点は、現実世界と仮想世界の差を埋めることです。仮想世界で学習した人工知能は、現実世界でうまく動作しないことが課題でした。この課題は現実と仮想世界のギャップ、いわば「現実との乖離」と呼ばれています。ドメインランダマイゼーションは、仮想世界に様々な変化を加えることで、この乖離を縮める効果があります。学習の際に多様な仮想環境に触れさせることで、現実世界でもうまく対応できる、柔軟な人工知能を育てることが期待できます。
一方で、ドメインランダマイゼーションにはいくつか課題も存在します。一つ目は、適切な設定の難しさです。仮想世界に変化を加える際、どの程度の変化を与えるべきかを適切に設定する必要があります。変化が小さすぎると効果が薄く、逆に大きすぎると学習が不安定になり、うまく学習できない可能性があります。ちょうど良い具合を見つけるのは、職人が技を磨くように、試行錯誤が必要となる場面もあります。二つ目は、計算量の多さです。多様な仮想環境を生み出すには、たくさんの計算が必要になります。これは、高性能な計算機が必要になることを意味し、誰でも手軽に利用できるわけではないという課題を抱えています。しかし、計算機の性能は日々向上しており、この課題は徐々に解決されつつあります。近い将来、誰でも手軽にドメインランダマイゼーションを利用できるようになるかもしれません。
| 項目 | 内容 |
|---|---|
| 利点 | 現実世界と仮想世界の差を埋める(現実との乖離を縮める)ことで、現実世界でもうまく対応できる柔軟な人工知能を育てる。 |
| 欠点 |
|
今後の展望

今後の展望として、ドメインランダマイゼーション技術の更なる発展が期待されます。現状はランダムに様々な設定値を変化させて多様な仮想環境を作り出していますが、今後は更に効率的に多様な仮想環境を作り出すための技術開発が進むと考えられます。
例えば、仮想環境の設定値を闇雲に変化させるのではなく、ある目的を持って効率的に多様な仮想環境を生成する手法が研究されています。具体的には、現実世界から得られた情報を仮想環境に取り入れることで、より現実に近い仮想環境を構築する研究が進められています。現実世界のデータと仮想環境のデータを組み合わせることで、仮想環境と現実世界の差を縮め、より現実的な仮想環境を作り出すことが可能になります。これにより、仮想環境で学習した人工知能を現実世界でより効果的に活用できるようになると期待されています。
また、近年目覚ましい発展を遂げている深層学習と呼ばれる技術とドメインランダマイゼーションを組み合わせる研究も活発に進められています。深層学習は、複雑な情報を扱うことが得意な技術です。この深層学習とドメインランダマイゼーションを組み合わせることで、複雑な仮想環境での学習を可能にし、より高度な人工知能の開発につながると考えられています。
これらの研究が更に進むことで、仮想環境と現実世界の差は縮まり、人工知能の活用範囲は大きく広がっていくでしょう。想像もしていなかった分野で人工知能が活躍する未来もそう遠くはないはずです。 ドメインランダマイゼーションは、人工知能の発展を大きく推進する重要な技術として、今後も注目を集め続けるでしょう。
| 現状 | 今後の展望 | 期待される効果 |
|---|---|---|
| ランダムに様々な設定値を変化させて多様な仮想環境を作り出している |
|
|