
ロボットの行動計画:静的と動的

AIを知りたい
先生、「ロボットの行動計画」って難しそうですね。静的プランニングと動的プランニングの違いがよくわからないです。

AIエンジニア
そうですね、少し難しいかもしれませんね。簡単に言うと、静的プランニングは、ロボットが動く場所の地図が全部わかっている時に、あらかじめすべての動きを決めておく方法です。たとえば、お掃除ロボットが部屋の形をすべて把握している場合を想像してみてください。
AIを知りたい
なるほど。じゃあ、動的プランニングは、地図がわかっていない時ってことですか?
AIエンジニア
その通りです。動的プランニングは、ロボットが動く途中で、障害物を見つけたり、新しい情報を得たりした時に、その場で動きを修正する方法です。たとえば、探査ロボットが初めて行く場所で、周りの状況を見ながら進む場合などですね。
ロボットの行動計画とは。
人工知能で使われる言葉に「ロボットの行動計画」というものがあります。これは、ロボットに何かを達成させるために、どのような行動をさせればいいのかを決めることです。ロボットが活動する場所の状況が事前に全てわかっている場合は、前もって全ての行動を決めておく「静的計画」が役に立ちます。一方、ロボットが活動する場所の状況があらかじめわからない場合は、途中で計画を変更する必要があるかもしれません。このような場合は「動的計画」が役に立ちます。
行動計画とは

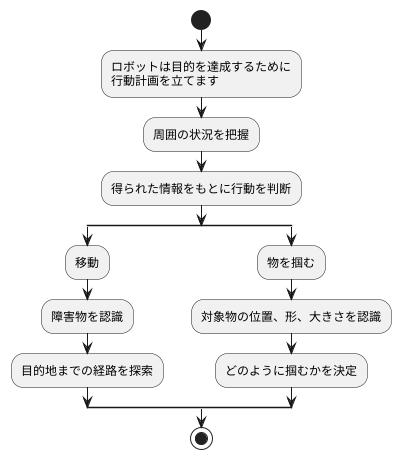
行動計画とは、ロボットが目的を達成するために必要な一連の動作を決める手順のことです。ロボットは、まず周囲の状況を把握します。そして、得られた情報をもとに、どのように行動すべきかを判断します。この一連の過程が、まさに「行動計画」です。
たとえば、ロボットが指定された場所に移動する場合を考えてみましょう。ロボットは、まず周囲にある障害物を認識しなければなりません。そして、それらを避けて目的地までたどり着くための経路を見つけ出します。この経路探索こそが行動計画の重要な要素です。障害物がない場合でも、最短経路を選ぶ、エネルギー消費を抑えるなど、様々な条件を加味して最適な経路を計画します。
また、ロボットが物を掴む場合も行動計画が必要です。ロボットは、対象物の位置や形、大きさなどを正確に認識する必要があります。そして、その情報をもとに、どのように掴むかを決定します。対象物が重ければ両手で掴む、壊れやすければ優しく包み込むように掴むなど、状況に応じて適切な方法を選ぶ必要があるのです。
このように、ロボットが何らかの作業を行う際には、必ず行動計画が存在します。それは人間が何かを行う際に無意識に行っている計画立案とよく似ています。目標を達成するための道筋を立てる、この行動計画こそがロボットに欠かせない能力と言えるでしょう。
静的計画

静的計画とは、あらかじめ環境の情報がすべて分かっている状況で用いられる計画手法です。具体的には、ロボットが活動する範囲にどのような障害物があるか、目的物はどこにあるか、それらの形や大きさなど、必要な情報がすべて事前に分かっていることを前提とします。まるで地図をすべて把握した上で旅の計画を立てるようなものです。
この手法を使う大きな利点は、行動を開始する前にすべての計画を立てられることです。すべての情報が事前に分かっているので、最適な経路や行動の順序などを事前に計算し、完璧な計画を立てることができます。そのため、計画を立てるのにかかる時間が短く、また、行動中に計画を変更する必要もありません。これは、工場の組み立て作業など、作業内容や環境が事前に確定している状況で非常に役立ちます。例えば、工場のロボットアームは、あらかじめ決められた手順で部品を組み立てていく作業を行います。このような場合、静的計画を用いることで、正確かつ迅速に作業を進めることができます。まるで、決められた楽譜通りに演奏する音楽家のように、正確で無駄のない動きを実現できるのです。
しかし、静的計画には大きな欠点もあります。それは、環境の変化に対応できないことです。事前に立てた計画は、環境が変化しないことを前提としています。もし、予期せぬ障害物が現れたり、目的物の位置が変わったりした場合、事前に作成した計画は役に立たなくなってしまいます。まるで、綿密に計画した旅行の途中で、予期せぬ道路の通行止めが発生した場合のように、対応に困ってしまうことになります。このような状況では、新たな情報に基づいて計画を立て直す必要があり、柔軟性に欠けるという弱点があります。そのため、環境が変化しやすい状況や、不確実性が高い状況では、静的計画は適していません。
| 項目 | 内容 |
|---|---|
| 定義 | あらかじめ環境の情報がすべて分かっている状況で用いられる計画手法 |
| 前提条件 | 障害物情報、目的物の位置、形状、大きさなど、必要な情報がすべて事前に既知であること |
| 利点 |
|
| 欠点 |
|
| 適した状況 | 工場の組み立て作業など、作業内容や環境が事前に確定している状況 |
| 不向きな状況 | 環境が変化しやすい状況や、不確実性が高い状況 |
動的計画

動的計画とは、刻々と変化する状況や、あらかじめすべてを把握できない状況の中で、最適な行動の筋道を段階的に組み立てていく手法です。あらかじめ全ての状況を想定した計画を立てるのではなく、行動しながら情報を集め、その都度計画を修正していくことで、変化への対応を可能にします。
たとえば、災害現場で人命救助を行うロボットを想像してみましょう。がれきの散乱状況は常に変化し、事前にすべてを把握することは不可能です。このような状況下では、ロボットはセンサーを用いて周囲の状況を把握し、得られた情報に基づいて進むべき経路をその場で決定する必要があります。これが動的計画の考え方です。瓦礫の山を迂回する必要があると判断すれば、当初の計画から経路を修正し、別のルートを探します。このように、予期せぬ出来事にも柔軟に対応できることが、動的計画の大きな利点です。
しかし、その都度、状況を判断し、計画を修正する必要があるため、静的な計画に比べて計算量が増え、処理に時間がかかるという難点もあります。また、状況把握のための高性能なセンサーや、適切な判断を行うための高度な計算技術も必要となります。計画の修正方法が不適切だと、目的を達成できない可能性も高まります。そのため、状況把握の精度と、計画修正の効率性が、動的計画を成功させる鍵となります。限られた時間で最適な行動を決定するためには、複雑な計算を素早く行う能力が求められます。
| 項目 | 内容 |
|---|---|
| 定義 | 刻々と変化する状況や、あらかじめすべてを把握できない状況の中で、最適な行動の筋道を段階的に組み立てていく手法 |
| 特徴 | 行動しながら情報を集め、その都度計画を修正していくことで、変化への対応を可能にする |
| 例 | 災害現場で人命救助を行うロボット:センサーで状況を把握し、経路をその場で決定、瓦礫を迂回する必要があればルートを修正 |
| 利点 | 予期せぬ出来事にも柔軟に対応できる |
| 難点 | 静的な計画に比べて計算量が増え、処理に時間がかかる。状況把握のための高性能なセンサーや高度な計算技術が必要。計画の修正方法が不適切だと、目的を達成できない可能性がある。 |
| 成功の鍵 | 状況把握の精度と計画修正の効率性 |
二つの計画の比較
ロボットの行動計画を作る方法は大きく分けて、静的計画と動的計画という二つのやり方があります。この二つの計画方法は、それぞれ違った特徴を持っているため、ロボットを使う目的や周りの状況に合わせて、どちらを使うかを決める必要があります。
静的計画は、周りの環境がすでに分かっている、そして変化しないという場合に効果を発揮します。あらかじめすべての情報が分かっているため、無駄のない行動計画を立てることが可能です。たとえば、工場の決まった作業を行うロボットを想像してみてください。工場のラインのように、作業内容や周りの環境がいつも同じであれば、静的計画を使ってあらかじめ最適な動き方を決めておくことで、効率的に作業を進めることができます。あらかじめ綿密な計画を立てられるため、正確で速い動作が可能になります。
一方、動的計画は、周りの環境が未知である場合や、状況が変化する可能性がある場合に役立ちます。あらかじめすべての情報が分かっているとは限らないため、状況に合わせて計画を立て直す必要があります。例えば、災害現場で人命を救助するロボットを考えてみましょう。周りの状況は刻一刻と変化し、予期せぬ出来事が起こる可能性もあります。このような状況では、柔軟に計画を調整できる動的計画が不可欠です。刻々と変化する情報を取り込みながら、その場で最適な行動を決定することで、予期せぬ事態にも対応できます。
このように、静的計画と動的計画はそれぞれ得意な分野が違います。ロボットにどんな仕事をさせたいのか、そしてロボットが働く環境はどのようなものなのかをよく考えて、最適な計画方法を選ぶことが大切です。状況に合っていない方法を選んでしまうと、ロボットがうまく動作しなかったり、目的を達成できなかったりする可能性があります。ロボットの能力を最大限に引き出すためには、適切な計画方法を選択することが重要です。
| 項目 | 静的計画 | 動的計画 |
|---|---|---|
| 環境 | 既知、不変 | 未知、変化する |
| 計画 | 事前決定 | 状況に応じて調整 |
| 利点 | 正確、高速 | 柔軟、予期せぬ事態に対応 |
| 例 | 工場のロボット | 災害救助ロボット |
今後の展望

機械の体を持つ仲間、ロボットの技術は、目覚ましい進歩を遂げています。特に、ロボットがどのように動くか、どのように目的を達成するかを決める行動計画の技術は、人工知能(AI)の進化と共に大きく変わってきています。
これまで、ロボットの動きは、あらかじめ人が細かく指示する必要がありました。しかし、機械学習という技術のおかげで、ロボットはまるで私たち人間のように、経験から学ぶことができるようになりました。例えば、荷物を運ぶロボットは、何度も往復することで、より速く、より安全な経路を見つけ出すことができるようになります。これは、過去の経験をデータとして蓄積し、それを元に最適な行動を自ら考えることができるようになったからです。
さらに、深層学習という技術は、ロボットに複雑な状況を理解し、判断する力を与えています。周りの環境を認識するセンサーからの情報をもとに、状況に応じて適切な行動を判断できるようになるのです。例えば、自動運転車は、深層学習によって周囲の車や歩行者を認識し、安全に運転できるようになります。
これらの技術革新によって、ロボットは、これまで人間が行っていた複雑な作業を代わりに行えるようになり、私たちの暮らしをより便利で豊かなものにしてくれるでしょう。家事や介護、災害救助など、様々な場面でロボットの活躍が期待されています。
今後のロボット技術の発展には、行動計画技術の更なる向上が欠かせません。より高度な計算方法や、より精密なセンサー技術の開発、そしてAI技術との融合によって、ロボットはより賢く、より器用に行動できるようになるでしょう。そして、私たちの社会にとって、なくてはならない存在として、様々な役割を担っていくと考えられます。
| 技術 | 説明 | 例 |
|---|---|---|
| 従来のロボット制御 | 人が細かく動きを指示する必要があった。 | – |
| 機械学習 | 経験から学習し、最適な行動を自ら考える。 | 荷物を運ぶロボットが、より速く安全な経路を見つけ出す。 |
| 深層学習 | 複雑な状況を理解し、状況に応じて適切な行動を判断する。 | 自動運転車が周囲の車や歩行者を認識し、安全に運転する。 |